
Rapport d'enquête maritime M11N0047
Heurt
du navire d'approvisionnement Maersk Detector et de l'unité mobile de forage en mer GSF Grand Banks
dans les Grands Bancs de Terre-Neuve
le
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu.
-
Table des matières
Résumé
L'après-midi du 24 novembre 2011, le navire d'approvisionnement en mer Maersk Detector utilise un système de positionnement dynamique alors qu'il charge la cargaison de l'unité mobile de forage en mer GSF Grand Banks, située dans le champ pétrolifère de White Rose. Au même moment, les conditions météorologiques se détériorent, entraînant l'amplification de la houle en provenance du sud. Le navire n'est pas en mesure de maintenir sa position, et à 15 h 30 min 39 s, heure normale de Terre-Neuve-et-Labrador, la poupe côté bâbord du Maersk Detector heurte la colonne intermédiaire du côté bâbord arrière du GSF Grand Banks, perforant le navire et l'appareil de forage. Il n'y a eu aucun blessé ni pollution.
This report is also available in English.
Renseignements de base
Fiche technique du navire
| Noms des bâtiments | Maersk Detector | GSF Grand Banks |
|---|---|---|
| Numéro de registre ou de permis | 828347 | 8752415 |
| Port d’immatriculation | St. John’s (Terre-Neuve-et-Labrador) | Port Vila (Vanuatu) |
| Pavillon | Canada | Vanuatu |
| Type | Navire d’approvisionnement en mer / remorqueur poseur d’ancres | Unité mobile de forage en mer (UMFM) semisubmersible Aker H-3.2 |
| Jauge brute | 5470 | 15 923 |
| LongueurNote de bas de page 1 | 89,3 m | 77,13 m |
| Tirant d’eau | Avant : 6,50 m Arrière : 6,90 m |
Bâbord avant : 20,19 m Tribord avant : 20,09 m Bâbord arrière : 20,13 m Tribord arrière : 20,01 m |
| Construction | Asenav - Astilleros y Servicios Navales S.A., Santiago (Chili) en 2006 | Saint John Shipbuilding and Drydock Co. Ltd., Saint John (Nouveau-Brunswick) en 1984 |
| Propulsion | 4 moteurs diesel MaK, puissance totale de 13 440 kW 2 hélices à pas variable, 4 propulseurs |
4 moteurs diesels-électriques Bergen (puissance totale de 7596 kW) entraînant 2 propulseurs orientables en azimut de 1500 kW |
| Cargaison | 126 tonnes de matériel d’installation de forage pétrolier | 3117 tonnes de matériel de forage pétrolier |
| Membres d’équipage | 15 | 90 |
| Propriétaires enregistrés | Maersk Supply Service Canada Ltd., St. John’s (Terre-Neuve-et-Labrador) | Global SantaFe Overseas Ltd (Bahamas) |
Description des bâtiments
Maersk Detector
Le Maersk Detector est un navire d'approvisionnement / remorqueur poseur d'ancres, classé comme navire d'approvisionnement en mer et doté d'un système de positionnement dynamique Kongsberg SDP 21. Le navire comprend 4 moteurs de propulsion principaux qui entraînent 2 hélices à pas variable. Chaque hélice est reliée à un moteur extérieur d'une puissance nominale de 3840 kilowatts (kW) et à un moteur intérieur d'une puissance nominale de 2880 kW, dont la vitesse de rotation est de 600 tours par minute (tr/min). Lorsque le système de positionnement dynamique est activé, les moteurs tournent à une vitesse de rotation constante.

La configuration des propulseurs comprend 4 unités : à l'étrave du navire se trouvent un propulseur en tunnel et un propulseur orientable en azimut rétractable (chaque propulseur étant doté d'un moteur de 883 kW), alors qu'à l'arrière se trouvent 2 propulseurs en tunnel, chacun doté d'un moteur de 700 kW. Tous les propulseurs sont actionnés par des hélices à pas variable alimentées par des moteurs électriques à courant alternatif (c.a.) tournant à une vitesse constante. Le navire est aussi doté de 2 gouvernails indépendants de type BeckerNote de bas de page 2. Consultez le plan général du navire à l'annexe A.
Système de positionnement dynamique
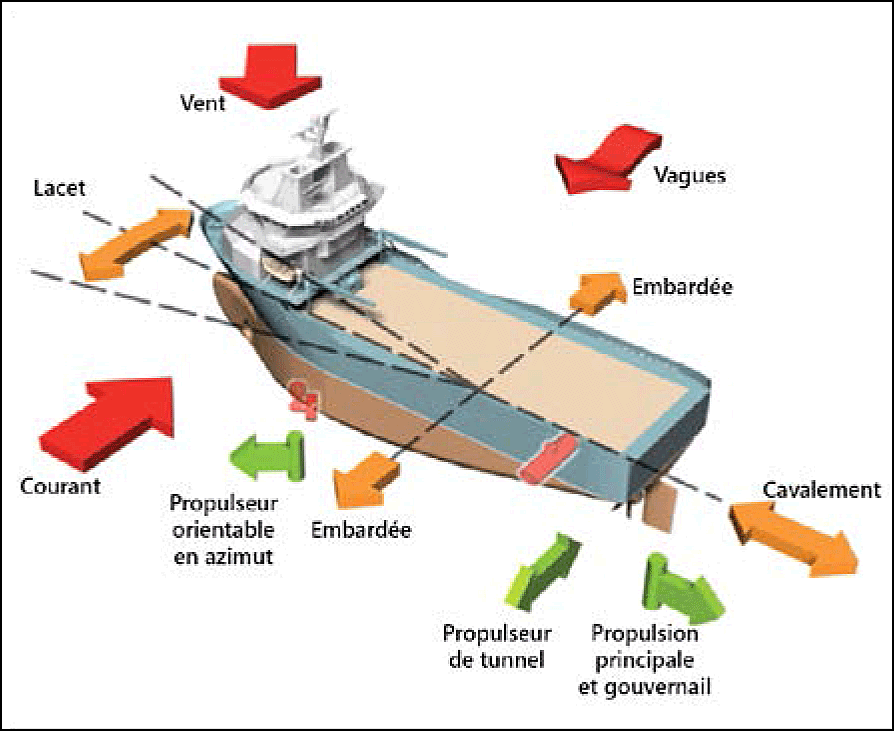
Un navire océanique est exposé aux forces du vent, des vagues et du courant, ainsi qu'aux forces produites par le système de propulsion du navire. La réaction du navire à ces forces (p. ex. changements de position, de direction et de vitesse) est mesurée par les systèmes de repérage et de mesure de position, le gyrocompas et les capteurs de référence verticale du système de positionnement dynamique. Les relevés des capteurs de référence verticale servent à corriger l'indicateur de roulis-tangage des relevés du système de repérage. La vitesse et la direction du vent sont mesurées par les capteurs de mesure du vent. Le système de positionnement dynamique utilise ces données afin de calculer les forces que doivent produire les propulseursNote de bas de page 3 pour contrôler le mouvement du navire en tenant compte de 3 degrés de liberté sur le plan horizontal - cavalement, embardée et lacet - selon les points de réglage établis par l'opérateur du système de positionnement global pour contrôler la position et la direction du navire (Figure 1)Note de bas de page 4.
Le système de positionnement dynamique du Maersk Detector a été conçu conformément aux exigences de la société de classification Lloyd's RegisterNote de bas de page 6 et aux normes de l'Organisation maritime internationale (OMI)Note de bas de page 7 concernant les systèmes de positionnement dynamique de classe 2Note de bas de page 8. Le système comprend les éléments suivants : 3 gyrocompas, 2 unités de détection du mouvement, 2 capteurs de mesure du vent, 2 systèmes de localisation GPS différentiels (DGPS), 1 système radar à laser de positionnement relatif et 1 système de positionnement acoustique de haute précision.
Les hélices principales, les gouvernails et les propulseurs peuvent être commandés à partir des panneaux de manœuvre qui se trouvent dans les zones avant et arrière de la passerelle de contrôle. Dans la zone de contrôle arrière se trouvent 2 pupitres d'exploitation identiques du système de positionnement dynamique (Figure 2) qui permettent de contrôler le navire en plusieurs modes à l'aide d'un logiciel. Les modes de positionnement dynamique disponibles sont les suivants :

(Cliquez pour agrandir l'image)
Retour au rapport↑
- Mode de veille : mode d'attente et de réinitialisation dans lequel le système est prêt à fonctionner, mais aucune commande de contrôle du navire ne peut être effectuée.
- Mode manette de commande : mode dans lequel l'opérateur contrôle le mouvement et la vitesse du navire à l'aide d'une manette de commande des 3 axes.
- Mode combiné manette de commande/mode automatique : mode dans lequel l'opérateur peut sélectionner 1 ou 2 des 3 axes (cavalement, embardée et lacet) pour le contrôle automatique de la position et de la vitesse du navire, tout en conservant le contrôle manuel du 3e axe.
- Mode position automatique : mode dans lequel le système maintient automatiquement la direction et la position du navire (les 3 axes). L'utilisateur entre le point de réglage de la position initiale voulue et la vitesse maximale requise pour se rendre au point de réglage. Après avoir atteint le point de réglage voulu, le système de positionnement dynamique contrôle les propulseurs du navire afin de maintenir cette position.
Le pupitre du système de positionnement dynamique comprend 20 écrans d'affichage de données mécaniques, de positionnement et de gestion d'énergie qui fournissent à l'opérateur du système des valeurs et des tendances en temps réel afin de l'aider à maintenir le contrôle complet du système et à conserver le point de réglage du navire de façon sécuritaire. Consultez l'Annexe B pour des exemples d'écrans d'affichage du système de positionnement dynamique du Maersk Detector. Ces écrans permettent à l'opérateur d'obtenir les renseignements suivants :
- Le tracé en temps réel de la position du navire par rapport au point de réglage sélectionné;
- L'information sur la performance des systèmes de repérage;
- Les détails sur les alarmes signalant un changement de position ou de direction;
- Les tendances indiquant l'historique des déviations moyennes, minimales, maximales et standards du navire sur une période donnée, en fonction de l'information sélectionnée (le vent, le courant marin, les déviations de position et de direction, les forces de propulsion et la consommation d'énergie);
- L'information sur la gestion de l'énergie des propulseurs du navire.
GSF Grand Banks
La GSF Grand Banks a commencé ses opérations au large de la côte est du Canada en 1984. Elle a été exploitée sous différents noms et à plusieurs endroits à travers le monde, avant qu'elle ne soit établie aux Grands Bancs de Terre-Neuve en 2003. Le GSF Grand Banks est une unité mobile de forage en mer (UMFM), aussi appelée appareil de forage, rectangulaire, à coque double, sur colonnes et sans autopropulsion. L'appareil compte 1 colonne de stabilisation de 9,0 m de diamètre à chaque coin (total de 4) et 4 colonnes de stabilisation intermédiaires de 7,4 m de diamètre montées sur 2 coques pour soutenir le pont principal. Le pont est doté d'un mât de forage au centre et de modules contenant les quartiers d'habitation, le matériel, la zone de stockage et les ateliers sur les périmètres.

Fonctionnement de la grue
Sur l'appareil de forage GSF Grand Banks, la grue côté bâbord sert principalement aux chargements de cargaison. En général, la cargaison est rangée du côté bâbord de l'appareil de forage, étant donné que la zone de la passerelle côté tribord contient les ensembles d'essai de forage et que l'espace y est donc limité.
Les limites opérationnelles de la grue côté bâbord de l'appareil de forage sont une vitesse du vent de 45 nœuds et une hauteur significative des vagues de 4 mNote de bas de page 10. L'opérateur de la grue utilise un anémomètre pour mesurer la vitesse du vent dans la cabine de grue et appelle périodiquement la salle de contrôle des ballasts de l'appareil de forage pour s'informer de la hauteur des vagues. Plus tôt le jour de l'événement, le contremaître du pont a appelé la salle de contrôle des ballasts et on l'a informé que la hauteur significative des vagues (Hs)Note de bas de page 11 était de 3,2 à 3,6 m.
La grue côté bâbord peut atteindre une distance maximale de 44,9 m, mais le réglage est habituellement limité à une portée de 39 m, laissant au moins 5 m pour suivre le navire avec le crochet de charge si nécessaire. La grue est aussi dotée d'un dispositif de largage de charge d'urgence qui, lorsqu'il est activé, permet aux treuils principal et auxiliaire d'entrer en chute libre non contrôlée pour larguer la charge.
La grue côté tribord ne peut atteindre la majorité de la cargaison qui se trouve du côté bâbord. Par conséquent, la cargaison doit être déplacée à portée de la grue côté tribord à l'aide de la grue côté bâbord. Il faut donc 2 grues de levage (1 pour chaque grue) pour soulever chaque cargaison lors du chargement d'un navire côté tribord. C'est pourquoi le côté tribord est utilisé seulement lorsque le côté bâbord n'est pas disponible et que la cargaison est essentielle pour la poursuite du forage.
Déroulement du voyage
Le 14 novembre 2011, le Maersk Detector a quitté St. John's (Terre-Neuve-et-Labrador) pour se rendre à l'appareil de forage GSF Grand Banks, qui était amarré à 8 ancres et effectuait des opérations de forage dans le champ pétrolifère de White Rose, propriété exploitée par Husky Oil Operations Limited, dans les Grands Bancs de Terre-Neuve (Annexe C). Le Maersk Detector est arrivé au champ pétrolifère le 15 novembre pour fournir ses services de réserve et d'approvisionnement en mer.
Vers 6 h 15Note de bas de page 12 le 24 novembre, le second capitaine - sécuritéNote de bas de page 13, qui était de quart, a informé le capitaine que le navire avait reçu une demande pour s'approcher de l'appareil de forage GSF Grand Banks afin de procéder au chargement de la boue de forage synthétique et de la cargaison qui se trouvait sur la passerelle (conteneurs et tuyaux). Il a ensuite effectué les listes de vérification du système de positionnement dynamique et préparé le chargement de la cargaison.
Au cours de la réunion quotidienne de 6 h 30 qui a eu lieu à bord du GSF Grand Banks, les superviseurs de l'appareil de forage ont discuté des opérations courantes et des activités prévues pour la journée. Au cours de la réunion régulière de 7 h, des opérateurs du champ pétrolifère, des représentants de Husky, des superviseurs de l'appareil de forage et l'observateur météorologique ont discuté des opérations maritimes et de forage courantes ainsi que des activités prévues, et ils ont examiné les prévisions météorologiques et discuté des conditions météorologiques actuelles. Les opérations de chargement prévues étaient considérées comme une activité de routine.
Vers 7 h, le capitaine du Maersk Detector s'est présenté sur la passerelle du navire. La demande du navire d'entrer dans la zone de sécurité de 500 mNote de bas de page 14 a été approuvée par la salle de contrôle des ballasts et, vers 7 h 36, le navire est entré dans la zone de sécurité de 500 m. Environ 10 minutes plus tard, le mode de position automatique du système de positionnement dynamique a été activé.
À 8 h 06, le navire était posté du côté sous le vent de l'appareil de forageNote de bas de page 15, le cap en direction est et son côté bâbord placé du côté bâbord de l'appareil de forage pour le chargement de la boue de forage et de la cargaison. Le chargement s'est poursuivi jusque vers 11 h 50, à l'heure où le navire est sorti de la zone de sécurité de 500 m pour permettre au Maersk Chancellor, un autre navire d'approvisionnement qui arrivait sur le site, de se placer le long de l'appareil de forage pour y décharger sa cargaison.
À 12 h, le second capitaine - navigation a pris le quart sur la passerelle. Il a effectué la liste de vérification appropriée et remplacé l'opérateur du système de positionnement dynamique alors que le navire se trouvait toujours à l'extérieur de la zone de sécurité de 500 m, attendant que le Maersk Chancellor termine son déchargement.
Vers 12 h 50, le second capitaine - navigation a effectué la liste de vérification appropriée et changé le mode position automatique du système de positionnement dynamique au mode manette de commande, et ce, afin de rentrer dans la zone de sécurité de 500 m pendant que le Maersk Chancellor en sortait. Vers 13 h, alors que le navire était à 100 m de l'appareil de forage, le second capitaine - navigation a ramené le système de positionnement dynamique en mode position automatique et s'est servi des données de changement de position et de direction du système pour se rapprocher de l'appareil de forage.
Vers 13 h 15, le Maersk Detector était à environ 15 m du côté sous le vent de l'appareil de forage avec une direction de 122° vrai (V) (Annexe D, Figure 1) et vers 13 h 30, les membres de l'équipage ont procédé au chargement des conteneurs sur la passerelle. Entre 13 h 30 et 14 h, la direction du vent a tourné du nord au sud-est, et le côté bâbord de l'appareil de forage est passé du côté sous le vent au côté au ventNote de bas de page 16. Aucune consigne officielle ni évaluation des risques n'a été effectuée pour les opérations de manutention du côté au vent.
Pendant le chargement de la cargaison, l'état de la mer et la direction du vent ont tourné, le vent provenant maintenant davantage du sud. Le capitaine a discuté des conditions météorologiques avec le contremaître du pont, qui manœuvrait la grue du côté bâbord de l'appareil de forage, et tous deux se sont mis d'accord pour cesser les opérations lorsque les conditions météorologiques deviendraient inappropriéesNote de bas de page 17. Comme le navire passait du côté sous le vent au côté au vent, quelques petits changements de direction ont été effectués pour garder le vent du côté bâbord avant du navire.
Vers 14 h, les membres de l'équipage ont ajouté le système radar à laser de positionnement relatif comme troisième référence de position pour le système de positionnement dynamique. À 14 h 30, la direction du navire avait été changée à 140 °V, et le vent soufflait à environ 45° du côté tribord avant du navire alors qu'on poursuivait les opérations de chargement (Annexe D, Figure 2). Vers 14 h 45, le capitaine a effectué la liste de vérification appropriée et remplacé le second capitaine - navigation aux commandes du système de positionnement dynamique. Le second capitaine - navigation est resté sur la passerelle en tant qu'officier de quart pour surveiller le chargement de la cargaison et entrer les données pertinentes dans le système; il est resté à côté du capitaine. Le capitaine a alors procédé à une analyse de la capacitéNote de bas de page 18 en utilisant les conditions actuelles du vent et une hauteur significative des vagues de 5 m. Les résultats indiquaient que le navire pouvait maintenir sa position en mode position automatique dans n'importe quelle direction. Le second capitaine - navigation est allé s'asseoir sur le siège côté bâbord arrière de la passerelle afin de prendre contrôle du chargement de la cargaison; lorsque cela s'avérait nécessaire, il se servait du canal 6 des radiotéléphones très haute fréquence (VHF) et ultra haute fréquence (UHF) pour communiquer avec les membres de l'équipage de la passerelle et de l'appareil de forage.
À 15 h, la direction du navire avait dévié à 160 °V, mettant le vent à environ 25° du côté tribord avant (Annexe D, Annexe D, Figure 3). Le capitaine a alors utilisé le canal 6 du radiotéléphone VHF pour communiquer avec la salle de contrôle des ballasts afin d'obtenir de l'information sur l'état de la mer. On l'a informé que la hauteur significative des vagues était de 3,5 m.
Vers 15 h 10, le foreur qui se trouvait dans la salle de repos sur l'appareil de forage a regardé le navire à travers une fenêtre et il a informé le directeur de l'installation de forage en merNote de bas de page 19 que le Maersk Detector semblait trop près de l'appareil de forage. Le directeur de l'installation a appelé le surveillant de chalandNote de bas de page 20 qui est venu observer la position du navire. Il s'est adressé à l'opérateur de la grue qui lui a dit que le navire semblait garder une distance sécuritaire. Le surveillant de chaland est resté sur la passerelle pour observer le navire pendant environ 10 minutes. Il a alors libéré l'opérateur de contrôle des ballasts de ses fonctions dans la salle de contrôle des ballasts pour qu'il puisse aller se reposer et a informé le directeur de l'installation de forage en mer que la position du navire était adéquate. Le directeur de l'installation a communiqué cette information au foreur.
Vers 15 h 10, le représentant de Husky Logistics, qui se trouvait sur l'appareil de forage, a communiqué avec le capitaine du navire pour discuter des conditions météorologiques et l'informer que la hauteur significative des vagues était de 3,5 m. La vitesse du vent était d'environ 20 nœuds et les houles semblaient augmenter. Ils ont donc convenu que le capitaine pouvait cesser les opérations en tout temps si les conditions météorologiques l'exigeaient.
À 15 h 22, on a chargé le dernier conteneur sur le navire, et on devait ensuite procéder au chargement de tuyaux. Le capitaine a alors changé la position et la direction du navire pour l'éloigner de l'appareil de forage et a modifié la direction de 20° à tribord pour être mieux placé pour charger les tuyaux à l'arrière du navire. Vers 15 h 24, le cap du navire était à environ 180° et davantage en direction de la houle (Annexe D, Figure 4). Le capitaine a changé l'orientation du propulseur avant de la position « par le travers fixe »
(90° du centre) à la position « stabilisation variable »
.
Le capitaine a continué à agir en tant qu'opérateur du système de positionnement dynamique pendant 6 minutes. Pendant que le navire tanguait et était soulevé par une houle qui s'amplifiait en direction du sud, le capitaine regardait par la fenêtre arrière pour juger la distance entre la poupe du navire et l'appareil de forage. Le second capitaine - navigation était la seule autre personne qui se trouvait sur la passerelle et il continuait à surveiller les opérations des membres de l'équipage sur le pont et à entrer les données dans le système. Le capitaine a alors utilisé le canal 6 du radiotéléphone VHF pour informer le contremaître du pont, qui manœuvrait la grue, que le navire était en position et prêt pour le chargement.
Vers 15 h 29, la grue balançait le premier chargement de tuyaux au-dessus du navire. Il y avait alors une distance d'environ 15 m entre la poupe côté bâbord du navire et la colonne intermédiaire arrière du côté bâbord de l'appareil de forage. Peu de temps après, tout en subissant le mouvement des 5 houles qui ont suivi, le navire a commencé à se déplacer vers l'arrière à une vitesse moyenne d'environ 0,4 m/s. Pendant le mouvement de la quatrième houle, le capitaine a tenté d'augmenter la distance de séparation entre le navire et l'appareil en entrant une commande de « changement de position »
de 4 m dans le système de positionnement dynamique. Cependant, le navire a continué à s'approcher de la colonne de l'appareil de forage. À 15 h 30 min 39 s, le navire a heurté l'appareil de forage, perforant la colonne intermédiaire arrière du côté bâbord de l'appareil et le réservoir du coqueron de la poupe du côté bâbord du navire.
Au même moment, un tremblement a été ressenti dans l'appareil de forage; on a vérifié les écrans de télévision en circuit fermé, mais rien n'indiquait quelle pouvait en être la cause. Le surveillant de chaland a appelé l'opérateur de la grue qui l'a informé que le navire avait heurté l'appareil de forage. Il a ensuite appelé le capitaine du navire qui lui a dit de rester en attente. Environ 1 minute plus tard, un des officiers de pont l'a informé que le navire avait heurté l'appareil de forage au-dessus de la ligne de flottaison, et un deuxième appel a suivi peu après pour l'informer que le navire et l'appareil de forage avaient été perforés. Le surveillant de chaland a alors informé le directeur de l'installation de forage en mer et a entrepris la supervision de l'équipe de contrôle des dommages. Il a demandé à l'opérateur de contrôle des ballasts de déballaster l'appareil de forage pour passer d'un creux de 22 m à un creux de 19 m afin d'arrêter l'infiltration d'eau dans la colonne perforée. Le navire s'est immédiatement déplacé d'environ 15 à 20 m, et les membres de l'équipage ont déconnecté les élingues de tuyaux du crochet de la grue. Vers 15 h 39, le Maersk Detector s'est déplacé au sud de l'appareil de forage et est passé du mode de positionnement dynamique au mode de commande manuelle de la passerelle.
Essais en service du système de positionnement dynamique
Les 4 et 5 décembre, on a procédé à un essai en service du système de positionnement dynamique du Maersk Detector au large de St. John's. Cet essai a été effectué afin de vérifier la capacité de redondance du système par la simulation de la défaillance de plusieurs composantes et afin de prouver que le système était entièrement fonctionnel et en bon état. Les relevés de cet essai indiquent que le système de positionnement dynamique du Maersk Detector répondait à tous les critères pertinents et qu'il n'y avait aucune indication de problèmes liés au système qui auraient pu avoir une incidence sur le maintien en position du navire.
Dommages causés aux bâtiments
La poupe côté bâbord du Maersk Detector a été perforée, et 3 couples ont été déformés dans la citerne de ballast numéro 23 (photo 3 et photo 4), laissant déverser de l'eau de forage dans l'océan.


L'appareil de forage GSF Grand Banks a été perforé au niveau d'un compartiment vide sur la colonne intermédiaire arrière côté bâbord, juste au-dessous de la plate-forme étanche de 27 m en direction de l'extrémité arrière du système de défense (Photo 5). L'appareil de forage a été déballasté d'un creux d'environ 3 m pour arrêter l'infiltration d'eau. La citerne était à environ 11,25 m de profondeur et remplie à environ 0,4 m avant le déballastage.

Certificats et expérience de l'équipage
Le capitaine et les officiers de navigation possédaient tous les certificats de compétence requis pour leur poste respectif. Le capitaine détenait un brevet de capitaine au long cours, avait reçu une formation reconnue sur l'exploitation d'un système de positionnement dynamique et possédait un certificat « unlimited DP operator »
émis par le Nautical Institute, au Royaume-Uni. Il possédait 26 années d'expérience sur les navires d'approvisionnement, dont 10 en tant que capitaine. Il était capitaine du Maersk Detector depuis 4 ans et avait agi en tant qu'opérateur principal du système de positionnement dynamique pendant 2 ans, lorsque cela s'avérait nécessaire.
Le second capitaine - navigation détenait un brevet d'officier de pont de quart. Il avait également reçu une formation reconnue sur le système de positionnement dynamique et détenait un certificat « unlimited DP operator »
émis par le Nautical Institute, au Royaume-Uni. Il possédait 4 années d'expérience en tant que second capitaine avec Maersk, dont 2 années sur le Maersk Detector. Pendant 1 an, il avait agi en tant qu'opérateur junior du système de positionnement dynamique, lorsque cela s'avérait nécessaire.
Certificats du navire
Le navire possédait l'équipage et l'équipement requis conformément aux règlements en vigueur et détenait les certificats valides émis par Lloyd's Register au nom de Transports Canada (TC).
Conditions environnementales
Prévisions météorologiques
Les prévisions météorologiques maritimes avaient été transmises à l'appareil de forage et aux navires d'approvisionnement par une compagnie basée à terre. Les prévisions émises à 6 h et à 12 h indiquaient que la hauteur significative des vagues augmenterait au cours de la journée pour atteindre 3,3 m à 14 h 30 et 4,9 m à 20 h 30. Les prévisions calculées à 10 m indiquaient aussi des vitesses de vent moyennesNote de bas de page 23 de 32 nœuds à 14 h 30 et de 21 nœuds à 20 h 30, avec un vent provenant du sud (180°) à 14 h 30 et tournant vers le sud-ouest (220°) à 20 h 30.
Mesure des conditions météorologiques
Il y a une bouée flottante pour la mesure directionnelle des vagues à 2,83 milles marins (nm) au nord-nord-est de l'appareil de forage GSF Grand Banks. Toutes les 1,6 seconde, la bouée transmet des données brutes sur les vagues à la station de réception des données sur les vagues, qui se trouve sur la passerelle de l'appareil de forage. L'appareil de forage et le navire utilisent aussi un anémomètre pour surveiller et enregistrer la vitesse et la direction du vent.
Selon les données enregistrées, entre 14 h 30 et 15 h, la direction du vent est passée de 192 à 202°, avec une augmentation de la vitesse du vent à 20 nœuds. Entre 15 h et 15 h 30, la direction du vent variait entre 200 et 205°, avec une vitesse de vent variant entre 18 et 24 nœuds. Entre 15 h et 16 h, la période des vagues était estimée à environ 8 secondesNote de bas de page 24 et les 3 vagues les plus hautes enregistrées par la bouée étaient de 9,47 m à 15 h 07, de 8,72 m à 15 h 44 et de 9,62 m à 15 h 46 (Figure 3).

Comme les vagues venaient du sud, la bouée a enregistré la hauteur des vagues après leur passage près de l'appareil de forage. Le temps de parcours d'une vague avec une période de vagues de 8 secondes entre l'appareil de forage et la bouée flottante est d'environ 14 minutesNote de bas de page 26. Si les vagues ont conservé leurs caractéristiques tout au long de leur parcours, les mesures enregistrées à la bouée flottante étaient donc représentatives du type de vagues qui ont frappé l'appareil de forage 14 minutes plus tôt. Des vagues d'une hauteur de 8,72 m et de 9,62 m ont été enregistrées à la bouée flottante 14 et 16 minutes après la collision. Il est donc possible que 1 ou plusieurs vagues de cette hauteur aient frappé le navire immédiatement avant sa collision avec l'appareil de forage.
Compilation et communication de l'information environnementale
Les données brutes fournies par la bouée flottante sont automatiquement compilées à la station météorologique de l'appareil de forage, qui est exploitée par un observateur des glaces/observateur météorologique. L'écran des vagues de la station météorologique affiche la hauteur significative (Hs) et la hauteur maximale (Hmax) des vaguesNote de bas de page 27. La hauteur significative est mise à jour toutes les 200 secondes, alors que la hauteur maximale est mise à jour toutes les 30 minutes, à l'heure et à la demi-heure. Le jour de l'événement, l'écran des vagues affichait les hauteurs Hs et Hmax suivantes aux heures indiquées ci-après :
| Heure de compilation | 13 h 59 | 14 h 29 | 14 h 59 | 15 h 29 |
|---|---|---|---|---|
| Hs (m) | 3,16 | 3,51 | 4,14 | 4,50 |
| Hmax (m) | 4,71 | 6,53 | 6,57 | 9,47 |
L'opérateur de la station météorologique prépare son rapport d'observation météorologique (METAR) et l'envoie par courriel à toutes les heures, à la demi-heure, aux destinataires concernés : le service de l'environnement de Husky, le coordonnateur de Husky Logistics sur l'appareil de forage, le bureau de Husky Logistics à St. John's, ainsi que la salle de contrôle des ballasts de l'appareil de forage et Cougar Helicopters. Les données du rapport METAR qui a été envoyé par l'opérateur au moment de l'accident sont présentées au tableau 2. En général, l'opérateur prépare son rapport METAR avant l'heure de transmission prévue. En regardant les 2 tableaux, on remarque qu'à 14 h 29 et à 15 h 29/15 h 26, il y a un écart moins grand entre les valeurs Hs qu'entre les valeurs Hmax. Cette différence vient du fait que les valeurs Hs sont mises à jour plus fréquemment que les valeurs Hmax.
| Heure de transmission du rapport METAR | 13 h 31 | 14 h 29 | 15 h 26 |
|---|---|---|---|
| Hs (m) | 2,8 | 3,4 | 4,4 |
| Hmax (m) | 4,0 | 4,7 | 6,6 |
L'information météorologique est aussi fournie à l'appareil de forage par les ordinateurs du système d'avertissement d'amarrage qui sont placés à différents endroits, notamment la salle de contrôle des ballasts, le bureau du directeur de l'installation de forage en mer, le bureau de Husky et sur la passerelle. Le système d'avertissement d'amarrage reçoit les données météorologiques de la station météorologique de l'appareil de forage et met à jour les valeurs Hs toutes les 30 minutes. Lorsque l'opérateur de contrôle des ballasts reçoit une demande concernant l'état de la mer, il peut lire l'information sur l'écran du système d'avertissement d'amarrage. Le jour de l'événement, l'écran du système d'avertissement d'amarrage de la salle de contrôle des ballasts indiquait les valeurs Hs suivantes :
| Heure affichée sur l'écran du système d'avertissement d'amarrage de la salle de contrôle des ballasts | 14 h 38 | 15 h 08 | 15 h 38 |
|---|---|---|---|
| Hs (m) | 3,5 | 4,15 | 4,5 |
Les hélicoptères ne sont pas autorisés à atterrir sur l'appareil de forage GSF Grand Banks lorsque la hauteur significative des vagues atteint 6 m. À cette hauteur, en cas d'amerrissage forcé d'un hélicoptère, il devient difficile pour l'embarcation rapide de sauvetage de rescaper les personnes qui sont dans l'eau. C'est pourquoi l'opérateur de la station météorologique doit informer le bureau de répartition de Cougar Helicopters à St. John's lorsque la hauteur significative des vagues atteint 6 m. Aucune procédure semblable n'est prévue lorsque les conditions météorologiques limites pour le chargement de la cargaison sont atteintes.
Données du voyage
Enregistreur des données de voyage
Plusieurs modes de transport utilisent les données des enregistreurs de la voix et des données dans le cadre d'une enquête sur un accident ou un incident. En plus des conversations sur la passerelle, un enregistreur des données de voyage (VDR) conserve plusieurs renseignements, notamment la date et l'heure, la direction, la position et la vitesse du navire, les communications par radiotéléphone VHF, les images radar, les commandes envoyées au gouvernail et au moteur, la réponse à ces commandes ainsi que la vitesse et la direction du vent.
Le Maersk Detector était doté d'un VDR, même si cela n'était pas requis pour ce type de voyage. À la suite de l'accident, les enquêteurs du BST ont récupéré les données du VDR du Maersk Detector. Les diagrammes de l'Annexe E et de l'Annexe F présentent certaines données significatives pour l'enquête qui ont été récupérées et analysées sur une période de 10 minutes précédant et incluant la collisionNote de bas de page 28. L'analyse des données indique ce qui suit :
- Vers 15 h 24, la puissance de poussée du propulseur orientable en azimut s'est stabilisée de façon significative et au même moment, le paramètre de commande a commencé à fluctuer. Cela concorde avec le changement du mode de contrôle du propulseur orientable en azimut de fixe à variable par le capitaine.
- Après avoir réglé le mouvement de l'appareil de forage GSF Grand Banks, les données relatives à la distance entre la poupe du Maersk Detector et le centre de la colonne intermédiaire arrière du côté bâbord de l'appareil de forage (la
« distance to pylon centre »
sur le diagramme, ou distance de séparation) indiquaient des oscillations à haute fréquence avec une période d'environ 8 secondes. En effet, les données de position enregistrées par le VDR comprenaient le mouvement de l'antenne du GPS, et reflétaient par conséquent le mouvement du navire autour de son propre axe (principalement le tangage dans les vagues) ainsi que l'augmentation et la diminution de la distance de séparation entre le navire et l'appareil de forage. - Les données relatives à la distance de séparation enregistrées pendant les 6,5 minutes qui ont précédé le heurt indiquent aussi une oscillation à faible fréquence qui reflète le mouvement du navire qui s'approchait et s'éloignait de l'appareil de forage pendant la même période.
- Entre 15 h 29 min 30 s et 15 h 30 min 00 s (soit pendant 30 secondes), la distance entre l'appareil de forage et le navire a semblé se stabiliser, après quoi elle a commencé à diminuer de façon stable après avoir subi 4 oscillations à haute fréquence complètes (principalement en raison du tangage dans les vagues). Elle a atteint son minimum vers 15 h 30 min 39 s, heure de la collision.
- Vers 15 h 30 min 16 s, après que le navire a commencé son mouvement final vers l'appareil de forage, les données indiquent que la poussée produite par les 2 moteurs principaux et le propulseur orientable en azimut a nettement augmenté. Cette poussée a servi à éloigner le navire de l'appareil de forage et a atteint une valeur de moins de 5 % du maximum pour chaque hélice principale et de moins de 40 % du maximum pour le propulseur orientable en azimut.
- Vers 15 h 30 min 35 s, il y a eu une brève interruption, ou chute, de la poussée avant, après quoi celle-ci a augmenté de nouveau pour atteindre une valeur de crête de moins de 5 % pour chaque hélice principale et juste au-dessus de 40 % pour le propulseur orientable en azimut.
- Les données du VDR relatives à la poussée longitudinale et à la distance de séparation sont en déphasage de 180° les unes par rapport aux autres.
Lors de la récupération des données du VDR, l'enquête a démontré que les données des conversations sur la passerelle étaient corrompues et inutilisables en raison d'une erreur du logiciel du VDR. Le fabricant était déjà au courant de cette erreur du logiciel. Le 21 juin 2011, le fabricant a émis un avis technique (Technical Advisory Sheet No. 379) demandant qu'une mise à jour du logiciel soit effectuée lors du prochain essai annuel de fonctionnement à bord. Sur le Maersk Detector, cet essai devait être effectué en décembre 2011.
Système électronique de visualisation des cartes marines
Le Maersk Detector était doté d'un système électronique de visualisation des cartes marines (SEVCM). Les données du VDR ont servi à confirmer les données de positionnement et le calendrier fournis par les données du VDR.
Enregistreur chronologique de positionnement dynamique
L'enregistreur chronologique de positionnement dynamique est un outil logiciel servant à enregistrer les données liées aux opérations du système de positionnement dynamique et à extraire, analyser, modifier et archiver ces données. Dans le cas présent, l'appareil était fonctionnel, mais il n'enregistrait aucune donnée. L'appareil a été installé en mai 2011, mais il a cessé d'enregistrer des données à la suite d'une réinitialisation de routine en juillet 2011, car il n'était pas réglé pour un redémarrage automatique après la réinitialisation. Au moment de l'installation de l'enregistreur, les membres de l'équipage ont été informés que l'appareil pouvait fonctionner en arrière-plan sans l'intervention d'un opérateur. Il n'y avait aucun manuel d'instructions pour l'enregistreur chronologique de positionnement dynamique à bord du navire.
Journal d'exploitation du panneau du système de positionnement dynamique
Lorsque le système de positionnement dynamique est activé, les messages sont transmis du panneau de l'opérateur vers un circuit de pilotage du panneau qui les répartit aux composantes du système appropriées. Inversement, le circuit de pilotage du panneau reçoit les messages du système et les envoie au panneau de l'opérateur. Dans le cas présent, le système de positionnement dynamique du Maersk Detector était configuré pour archiver les messages en provenance du panneau de l'opérateur et du système, et vers ceux-ci (p. ex. l'activation des boutons, les changements d'état de la lampe, l'utilisation de la manette et de la roue de commande). Le personnel de service du fabricant du système de positionnement dynamique utilise cette information pour analyser les problèmes du système. À la suite de l'accident, le journal d'exploitation du panneau du système a été téléchargé par un technicien du fabricant et envoyé au siège social aux fins d'interprétation. Les résultats qui ont été retournés au BST ne comprenaient pas les données pour la période de l'accident. Les données du journal d'exploitation des ordinateurs OS1 et KM-OS finissaient à 14 h 25 min 18 s et à 13 h 29 min 44 s respectivement. Le fabricant n'a pas été en mesure de déterminer la raison pour laquelle ces données n'étaient pas disponibles.
Avertissements et alarmes du système de positionnement dynamique
Des vérifications opérationnelles sont effectuées en continu pendant que le système de positionnement dynamique fonctionne. Il y a 3 catégories de messages selon la gravité de la condition : messages d'information, avertissements et alarmes. Les messages d'information donnent des renseignements sur les conditions qui sont utiles, mais qui n'ont aucune incidence grave sur la performance du système. Les avertissements sont des indicateurs visuels seulement et ils donnent des renseignements sur les conditions du système qui, si elles sont ignorées, peuvent avoir une incidence indésirable sur le système ou déclencher une défaillance possible (p. ex. action erronée de l'opérateur, données de repérage et de mesure de la position intermittentes ou limite d'avertissement définie qui a été dépassée). Les avertissements s'affichent jusqu'à ce que l'opérateur en accuse réception. Des alarmes sonores et visuelles sont produites lorsque les conditions détectées ont une incidence critique sur la capacité ou la performance du système (défaillance du système ou limite d'alarme définie dépassée). Ces alarmes se poursuivent jusqu'à ce que l'opérateur en accuse réception. Cependant, les alarmes sonores peuvent être interrompues sans accusé de réception.
Les limites des avertissements et des alarmes concernant les déviations de position et de direction peuvent être établies par l'opérateur. Lors du déclenchement d'un avertissement ou d'une alarme, la déviation de position indiquée par le système est celle qui prévalait au moment du déclenchement; cependant, la déviation peut augmenter suivant le déclenchement de l'avertissement ou de l'alarme, mais elle ne sera pas indiquée sur le relevé du système. L'opérateur du système peut déterminer la déviation maximale de la position en surveillant de façon continue l'écran d'affichage approprié sur le pupitre d'exploitation du système et en examinant les tendances historiques de la position du navire. Sur le Maersk Detector, la pratique courante était de régler les seuils d'avertissement et d'alarme à 3 et 5 m respectivement pour la position, et à 3 et 5° respectivement pour la direction.
Le pupitre affiche aussi un avertissement lorsque la poussée dépasse 80 % pendant 5 secondes sur les hélices principales ou les propulseurs. Cet avertissement est annulé lorsque la poussée reste inférieure à 80 % pendant 20 secondes.
Un avertissement peut aussi être déclenché lorsque l'écart entre les données de position des systèmes de repérage et la position du navire estimée par le modèle logiciel du système de positionnement dynamique dépasse une limite définie par l'utilisateur. Cet écart peut être causé par une erreur du système de repérage ou de son interface avec le système de positionnement dynamique, ou encore par des perturbations environnementales (air/mer). Lorsque cela se produit, l'avertissement d'erreur de prédiction de repérage (« reference prediction error »
) est activé, et les données du système de repérage concerné sont rejetées. L'opérateur doit alors vérifier que l'essai a rejeté les données du système de repérage concerné en analysant les données en continuNote de bas de page 29 du système de repérage et les tendances historiques du système de positionnement dynamique. Si l'essai rejette le mauvais système de repérage, le modèle du système de positionnement dynamique pourrait suivre une position de référence erronée. Dans le cas présent, la limite était établie à 5,7 m.
Les avertissements et les alarmes qui ont été consignés par le système de positionnement dynamique du Maersk Detector entre 13 h 15 et 15 h 31 sont résumés dans le tableau suivant :
Tableau 4. Avertissements et alarmes du système de positionnement dynamique
| Période de temps | Événements | ||||||
|---|---|---|---|---|---|---|---|
| Scénario | Heure | Alarmes (Pos/Dir) | Avertissements (Pos/Dir) | Avertissements (Propulseur) | Avertissements (Prédiction de repérage) | TOTAL | Fréquence moyenne |
| Navire exploité du côté sous le vent de l’appareil de forage | 39 min 13 h 15 à 13 h 54) | - | 9 | - | - | 9 | 1 événement toutes les 4,3 min |
| Sautes de vent; navire exploité du côté au vent de l’appareil de forage | 88 min (13 h 54 à 15 h 22) | 10 | 59 | 4 | 2 | 75 | 1 événement toutes les 1,2 min |
| Direction finale modifiée à 180° | 6,58 min (15 h 24 à 15 h 30 min 35s) | 2 | 5 | - | 2 | 9 | 1 événement toutes les 0,73 min |
Après la collision, à 15 h 33 min 27 s, le système de positionnement dynamique a enregistré un message d'information indiquant l'arrêt de l'analyse des conséquences (« consequence analysis stopped »
). L'analyse des conséquences est la fonction qui permet au système de positionnement dynamique de vérifier sa redondance en continuNote de bas de page 30. Pour le Maersk Detector, un message d'arrêt d'analyse des conséquences signifie que le système est passé du mode position automatique au mode manette de commande partiel ou total, ou que l'analyse des conséquences a été interrompue par l'opérateur du système.
Lignes directrices concernant les navires de service en mer de Husky
Husky Oil Operations Limited gère et soutient le champ pétrolifère de White Rose en utilisant les infrastructures logistiques et les ressources établies à St. John's. Il y avait une copie des lignes directrices concernant les navires de service en mer de Husky à bord du Maersk Detector au moment de l'événement. Le but de ces lignes directrices est de fournir aux propriétaires des navires de service en mer, aux capitaines de navire et aux membres de l'équipage des directives sur les opérations des navires de service en mer de Husky - Région de l'Atlantique. Les lignes directrices énoncent clairement que le capitaine d'un navire a l'autorité suprême de déterminer si une opération portant préjudice à la sécurité et à l'intégrité du navire ou à la sécurité des membres de l'équipage doit être maintenue ou suspendue.
Les lignes directrices stipulent que les membres de l'équipage d'un navire devraient obtenir les prévisions météorologiques régulièrement et fréquemment et se servir de leur expérience pour évaluer les conditions qui prévalent et les tendances probables. Une opération du côté au vent est définie comme une situation où toute combinaison de forces environnementales, notamment les vents, les vagues, la houle, les courants et tout changement touchant ces forces pourraient déplacer le navire vers l'appareilNote de bas de page 31. Les lignes directrices touchant les opérations du côté au vent prévoient ce qui suit :
- Vitesse moyenne du vent de 20 à 25 nœuds à 10 m - Attacher les articles non fixés et prendre plus de précautions pour éviter les blessures infligées au personnel et les dommages causés au matériel.
- Vitesse moyenne du vent au-dessus de 25 nœuds à 10 m - Arrêt des opérations.
- Valeur Hs de 3 à 4 m - Le directeur de l'installation de forage en mer, l'opérateur de la grue et le capitaine devraient évaluer le positionnement et le chargement de la cargaison avant d'entrer dans la zone de sécurité.
- Valeur Hs au-dessus de 4 m - Arrêt des opérations.
- Poussée des hélices et des propulseurs supérieure à 50 % — Arrêt des opérations.
Les lignes directrices stipulent qu'on devrait procéder à une évaluation des risques avant d'entreprendre toute opération du côté au vent en raison des risques encourus lorsqu'un navire est incapable de maintenir sa position et qu'il est poussé sur l'appareil par les forces environnementales. Le processus d'évaluation devrait aider le capitaine à décider des mesures appropriées à prendre et devrait inclure la détermination des dangers potentiels, leur gravité et leur probabilité, les niveaux de risques associés, les mesures de réduction des risques supplémentaires à prendre afin de poursuivre les opérations, et une réévaluation pour confirmer que les risques résiduels sont dans les limites acceptables.
Les lignes directrices stipulent que l'évaluation des risques doit être approuvée par le capitaine et que les résultats doivent être transmis au directeur de l'installation de forage en mer aux fins d'examen. À la suite d'un accord entre le capitaine et le directeur de l'installation de forage en mer, les travaux peuvent reprendre selon les conditions énoncées dans l'évaluation des risques. Les résultats de l'évaluation des risques doivent aussi être transmis à l'équipe de gestion à terre de l'opérateur du navire et à Husky Energy. Une évaluation des risques des opérations effectuées du côté au vent sur le Maersk Detector aurait donc dû être effectuée vers 14 h en raison du changement de direction du vent, mais celle-ci n'a pas eu lieu.
Les lignes directrices stipulent également que l'état opérationnel de tout navire qui utilise un système de positionnement dynamique doit être surveillé de façon continue. Ceci signifie qu'une procédure doit être mise en place à bord du navire pour avertir les membres de l'équipage et le personnel concerné des changements de l'état opérationnel du système de positionnement dynamique du navire. La procédure doit faire référence aux niveaux d'état définis par l'industrie :
- Alerte verte - État opérationnel normal; la performance du système de positionnement dynamique est à l'intérieur des limites de travail sécuritaires.
- Alerte jaune - État opérationnel dégradé; dépassement des limites de travail sécuritaires ou possibilité d'une déviation non critique de la direction ou de la position.
- Alerte rouge - État d'urgence; perte de position ou perte de position inévitable.
À partir d'environ 13 h 54, lorsque le vent a tourné, le Maersk Detector manœuvrait en état d'alerte jaune. Cet état a changé en alerte rouge pendant les 30 secondes qui ont précédé la collision. Cependant, il n'y avait aucun système à bord du navire pour catégoriser ou communiquer l'état du navire.
Analyse de la capacité du système de positionnement dynamique
Afin d'informer les propriétaires, les opérateurs et les membres de l'équipage du navire de la capacité du navire à maintenir sa position et sa direction, la méthode courante est de procéder à une analyse de la capacité du système de positionnement dynamiqueNote de bas de page 32 Note de bas de page 33. Cette méthode utilise des calculs statiques pour comparer la charge environnementale totale avec la puissance propulsive réelle du navire, incluant une réserve dynamique de 20 %. Les résultats de cette analyse peuvent être présentés sous forme de diagrammes polaires, chaque configuration de propulseur étant représentée par un diagramme; ceux-ci indiquent la vitesse limite théorique du vent, de toutes les directions, au-dessous de laquelle les forces environnementales peuvent être neutralisées par la poussée propulsive du navireNote de bas de page 34.
Le fabricant du système de positionnement dynamique du Maersk Detector a effectué une analyse de la capacité du système en 2004. Les résultats de l'analyse sont présentés à l'Annexe G et illustrent ce qui suitNote de bas de page 35 :
- La vitesse limite théorique du vent est de 33,2 nœuds en provenance d'une direction de 110 et 250°, ce qui correspond à des vagues d'une hauteur significative de 4,7 m.
- La vitesse limite théorique du vent pour des vents provenant d'une direction de 20° de l'étrave du navire (comme le jour de l'événement) est de 65,6 nœuds, ce qui correspond à des vagues d'une hauteur significative de 10,1 m.
En plus de l'analyse de la capacité théorique décrite ci-dessus, le système de positionnement dynamique du Maersk Detector comprend aussi une fonction d'analyse de la capacité en ligne. Le jour de l'événement, peu après 14 h 45, le capitaine s'est servi de cette fonction pour vérifier la capacité du navire advenant le cas où la hauteur significative des vagues atteindrait 5 m. Les résultats étaient positifs. Au moment de l'analyse, la direction du navire était de 140° avec des vents d'environ 20 nœuds à environ 50 ou 60° du côté tribord avant. Le diagramme présenté à l'Annexe G indique qu'avec des vents en provenance de cette direction et tous les propulseurs activés, la vitesse limite théorique du vent est de 40 nœuds, ce qui correspond à des vagues d'une hauteur significative d'environ 5,5 m.
On peut utiliser le tracé d'empreinte localisatrice pour vérifier le bon fonctionnement du système de positionnement dynamique. Ce tracé indique la position du navire alors qu'il fonctionne en mode de positionnement dynamique dans les conditions environnementales et les configurations de propulsion en vigueur. Les distances d'excursionNote de bas de page 36 dépendent de nombreux facteurs, notamment le mouvement induit du vent et de la houle. Le tableau qui suit présente un sommaire des exemples de tracés d'empreinte localisatrice du Maersk Detector dans des conditions environnementales et des configurations de propulsion semblables à celles qui étaient présentes le jour de l'événement ou pires que celles-ci. Bien qu'aucun tracé d'empreinte localisatrice n'ait été effectué le jour de l'événement, des données pertinentes pour cette journée sont aussi présentées aux fins de comparaison (Annexe H).
| Direction du navire | Vitesse du vent (en nœuds) | Direction du vent | Houles | Excursion max. enregistrée | |
| Événement | 180° | 18 à 24 | 200° (20° du côté tribord avant) | 4,5 m (Hs) | 15 m (arrière) |
| Tracé (a) | 175° | 35 | 178° (3° du côté tribord avant) | Inconnu | 4 m (avant) |
| Tracé (b) | 168° | 30 à 35 | 148° (20° du côté bâbord avant) | Inconnu | 3,9 m (arrière) |
| Tracé (c) | 168° | 35 à 40 | 150 à 160° (8 à 18° du côté bâbord avant) | Inconnu | 2,7 m (avant) |
| Tracé (d) | 300° | 28 | 335° (5° du côté tribord avant) | 2,5 m | 1,5 m (côté bâbord) |
Gestion des ressources à la passerelle
La gestion des ressources à la passerelle (GRP) est la gestion et l'utilisation efficaces de toutes les ressources, humaines et techniques, qui sont à la disposition de l'équipe à la passerelle afin d'assurer la sécurité du voyage. La GRP inclut la gestion de la charge de travail, la résolution des problèmes, la prise de décision, le travail d'équipe et la connaissance de la situation, principalement pendant les opérations importantes. Plus spécifiquement, les membres de l'équipe à la passerelle ont la responsabilité de maintenir une bonne connaissance de la situation tout en se consacrant à leurs tâches individuelles. De plus, comme les membres d'une même équipe doivent travailler ensemble vers un but commun, l'échange d'information est essentiel à l'efficacité de l'équipeNote de bas de page 37. Le manque de communication peut faire en sorte que les membres de l'équipage ne partagent pas une vision commune de la situation.
Dans le cas présent, ni le capitaine, ni le second capitaine - navigation n'avaient reçu une formation adéquate sur la GRP. TC n'exige pas que les officiers de pont reçoivent une formation sur la GRP afin d'obtenir ou de conserver leur certificat de compétence, bien qu'il fixe des normes pour la formation non obligatoire sur la GRPNote de bas de page 38. Cependant, TC prévoit modifier le Règlement sur le personnel maritime relativement à la GRP pour satisfaire aux exigences de la Convention sur les normes de formation des gens de mer, de délivrance des brevets et de veille (STCW) ainsi que les modifications de Manille de 2010. Les modifications prévues par TC comprendraient l'exigence de détenir des compétences et des connaissances en GRP pour obtenir un brevet d'officier de pont de quart. De plus, la formation sur la GRP approuvée par TC, conformément aux normes de formation des gens de mer, de délivrance des brevets et de veille, serait obligatoire pour obtenir les certificats de compétence suivants :
- capitaine au long cours;
- capitaine, à proximité du littoral;
- capitaine jauge brute de 3000, illimité
- capitaine jauge brute de 3000, à proximité du littoral;
- premier officier de pont;
- premier officier de pont, à proximité du littoral.
Recommandations du Bureau en suspens
En 1995, le BST a publié un rapport intitulé Étude de sécurité portant sur les rapports de travail entre les capitaines et les officiers de quart, et les pilotes de navireNote de bas de page 39. Le but de cette étude était de déterminer les manquements à la sécurité associés au travail d'équipe sur la passerelle, y compris les échanges entre les pilotes et les capitaines ou les officiers de quart. Le rapport faisait état des préoccupations liées à la sécurité concernant la mise en place d'une GRP efficace par les équipes à la passerelle et formulait les recommandations suivantes, qui n'ont pas encore reçu la cote « Attention entièrement satisfaisante »
Note de bas de page 40 :
Le ministère des Transports exige que le programme de formation initiale de tous les officiers de navire soit modifié de façon à comporter un volet sur les compétences en gestion des ressources sur la passerelle.
Recommandation M95-09
Le ministère des Transports exige que tous les officiers de navire fassent la preuve de leurs compétences en gestion des ressources sur la passerelle avant de se voir délivrer des certificats de maintien des compétences.
Recommandation M95-10
En janvier 1996, TC énonçait dans sa réponse à ces recommandations que le ministère favorisera l'élaboration et la prestation de cours de GRP et qu'il se peut qu'on exige d'avoir réussi préalablement un tel cours lorsqu'ils seront offerts au Canada. TC a aussi indiqué que le ministère introduira progressivement cette exigence selon le certificat ou brevet détenu par le candidat. La réponse à ces 2 recommandations a reçu la cote « Intention satisfaisante »
par le BureauNote de bas de page 41.
Analyse
Événements ayant mené à la collision
Pendant que le Maersk Detector chargeait la cargaison de l'appareil de forage GSF Grand Banks, le vent a tourné comme prévu, plaçant le navire du côté au vent de l'appareil de forage. Lorsque cela s'est produit, la capacité du navire de maintenir sa position s'est dégradée, comme l'indique la fréquence croissante des avertissements et des alarmes de position et de direction.
Lorsque le navire a changé sa direction à 180° pour effectuer le chargement final de cargaison, cela a sensiblement modifié la perception visuelle du capitaine de la distance entre le navire et la colonne intermédiaire arrière côté bâbord de l'appareil de forage, car ce changement de direction augmentait la distance et l'angle de visibilité de la colonne depuis la passerelle. De plus, le tangage du navire changeait la vue derrière le navire; à certains moments, il semblait n'y avoir que très peu ou pas d'eau, alors qu'à d'autres moments, la distance complète entre l'arrière du navire et la colonne de l'appareil de forage était visible. C'est pourquoi il aurait vraisemblablement été très difficile de maintenir une évaluation juste de la distance par simple observation visuelle.
Le capitaine a alors commencé à déplacer le navire pour le chargement final en le plaçant à 15 m de l'appareil de forage. Pendant les 5 prochaines minutes environ, les données de l'enregistreur des données de voyage (VDR) indiquent que la distance entre le navire et l'appareil de forage augmentait et diminuait suivant un mouvement oscillatoire (Annexe E). Vers 15 h 29, le capitaine a informé l'opérateur de la grue qu'il était en position et prêt pour le chargement.
Les données du VDR indiquent qu'à peu près au même moment, le navire est resté en place pendant environ 30 secondes. Cependant, lorsqu'on regarde en contexte la tendance qui se dessinait au cours des 5 minutes précédentes, on remarque que le navire était au point le plus éloigné de l'appareil de forage. Après 30 secondes, le navire a commencé à se rapprocher de nouveau de l'appareil de forage.
Entre 15 h 24 et l'heure de la collision, le journal des alarmes indique que 5 avertissements de position hors limite et 2 alarmes ont été émis. De plus, le système de positionnement dynamique a enregistré des avertissements d'erreur de prédiction de repérage avec les 2 GPS juste avant la collision. Le chargement s'est poursuivi sans aucune réévaluation de la capacité du navire de maintenir sa position à l'intérieur des limites de l'alarme. Le capitaine a continué à manœuvrer à l'extérieur de ces limites, et ce, malgré le fait que ces alarmes étaient le résultat des commandes de changement de position qu'il avait lui-même entrées dans le système. Le capitaine a accordé la priorité à son évaluation visuelle de la distance au détriment des alarmes émises par le système de positionnement dynamique indiquant que le navire ne maintenait pas bien sa position.
Les données du VDR indiquent aussi que juste avant 15 h 30, lorsqu'on a commencé le chargement des tuyaux, la poussée du navire était dirigée vers l'avant pour éloigner le navire de l'appareil de forage. Au même moment, le navire a commencé à s'approcher de l'appareil de forage. Alors que le navire s'approchait de l'appareil de forage, le mouvement de tangage de la poupe par rapport à la colonne de l'appareil de forage semblait plus prononcé. Ce changement en apparence et le chargement en cours du premier tuyau sur le pont ont attiré l'attention du capitaine et ont influencé sa capacité de surveiller les pupitres du système de positionnement dynamique.
Malgré le fait que le capitaine a entré une commande pour modifier la position du navire de 4 m vers l'avant, le navire à continué à se déplacer vers l'arrière. Comme le tuyau était encore attaché à la grue, le capitaine a décidé de ne pas prendre le contrôle manuel pour éviter toute possibilité d'entraîner la grue vers le bas. La force de poussée vers l'avant appliquée par le système de positionnement dynamique au cours de ces dernières secondes n'a pas suffi à compenser les forces qui poussaient le navire vers l'arrière; le navire a donc heurté l'appareil de forage.
Capacité de positionnement dynamique
L'examen de l'information disponible concernant la capacité du Maersk Detector à maintenir sa position indique que le navire pouvait maintenir sa position à l'intérieur des limites de sécurité définies. Cette conclusion est soutenue par ce qui suit :
- L'analyse de la capacité théorique a indiqué que la poussée des propulseurs aurait dû suffire à maintenir la position du navire dans les conditions qui étaient présentes au moment de l'accident.
- Les essais effectués à la suite de l'événement ont confirmé que le système de positionnement dynamique fonctionnait selon tous les critères pertinents et qu'il n'y avait aucune indication que des problèmes de système auraient pu avoir une incidence sur le maintien en position du navire.
- Juste avant l'accident, la poussée appliquée par le navire était de moins de 5 % de la valeur maximale pour les hélices principales et de moins de 40 % pour le propulseur orientable en azimut, ce qui indique une poussée de réserve importante.
- Immédiatement après la collision, le navire est rapidement retourné à une position d'environ 15 m de l'appareil de forage en mode de position automatique, et il est demeuré dans cette position pendant que la grue de levage a été détachée. La poussée nécessaire pour maintenir cette position était alors inférieure à 5 % de la valeur maximale pour les hélices principales et juste au-dessus de 40 % pour le propulseur orientable en azimut.
Malgré cela, pendant environ 6 minutes avant la collision (après le changement de la direction à 180°), le maintien en position du Maersk Detector était instable, les données de position du VDR indiquant un mouvement d'oscillation qui rapprochait et éloignait le navire de l'appareil de forage. Le dernier mouvement du navire vers l'appareil de forage était donc prévisible. En outre, les données du VDR relatives à la poussée et à la distance de séparation étaient en opposition de phase de 180° les unes par rapport aux autres. Ceci indique un effet de couplage par lequel les données entrées par l'opérateur (dans le cas présent, le système de contrôle du positionnement dynamique ou le capitaine) ont engendré le mouvement indésirable du navire. L'enquête a pris en compte les facteurs ci-après comme causes possibles de l'effet de couplage :
- Après le changement de direction du navire, les vagues ont poussé le navire vers l'arrière, et le modèle du système de positionnement dynamique aurait pu être en mode d'ajustement pour compenser cette poussée.
- L'effet a pu être engendré par le capitaine alors qu'il entrait les commandes de changement de position sur le pupitre d'exploitation du système pour tenter de stabiliser le navire dans une position favorable au chargement de la cargaison. Il se peut que les nombreux avertissements et alarmes du système aient incité le capitaine à entrer ces commandes ou, inversement, que l'entrée de ces commandes ait déclenché ces avertissements et alarmes.
Outre les facteurs qui précèdent, plusieurs autres facteurs ont été considérés comme causes possibles de la collision :
- les données du VDR indiquaient une interruption momentanée de la poussée avant à 15 h 30 min 35 s;
- la possibilité qu'une ou plusieurs grosses houles aient frappé le navire immédiatement avant la collision avec l'appareil de forage;
- la précision des données de positionnement des systèmes de repérage du navire était déficiente juste avant la collision, comme l'indiquent les avertissements d'erreur de prédiction de repérage qui ont été consignés dans le journal des alarmes.
L'enquête n'a pas été en mesure de déterminer de façon concluante la portée de ces facteurs sur le mouvement du navire; toutefois, ils ont peut-être contribué à l'incapacité du navire à maintenir sa position par rapport à l'appareil de forage.
Gestion des ressources à la passerelle
Pour maintenir une bonne connaissance de la situation, les membres de l'équipe à la passerelle doivent connaître les intentions du capitaine et les mesures prises par celui-ci afin de fournir des conseils et des observations pertinents en temps opportun. Cet objectif peut être atteint par la tenue d'une réunion initiale suivie d'échanges d'information réguliers entre les membres de l'équipe à la passerelle, y compris le capitaine. La nécessité de maintenir une bonne connaissance de la situation et d'assurer un travail d'équipe et des échanges efficaces entre les membres de l'équipe à la passerelle est aussi importante lorsqu'on navigue en mode de positionnement dynamique qu'en mode conventionnel. Ce principe est reconnu dans les normes de l'industrie qui stipulent que « [traduction] lorsqu'un système de positionnement dynamique est utilisé, les membres clés du personnel qui utilisent le système doivent non seulement être compétents et avoir de l'expérience, mais ils doivent aussi être capable de travailler ensemble et de communiquer efficacementNote de bas de page 42. »
Dans le cas présent, le capitaine était le principal opérateur du système de positionnement dynamique, pendant que le second capitaine - navigation agissait en tant qu'officier de quart et surveillait le chargement de la cargaison à côté du capitaine; l'équipe à la passerelle était donc constituée de 2 membres. Lorsque les houles ont augmenté après que le vent a tourné, plusieurs avertissements et alarmes de position et de direction ont été enregistrés par le système de positionnement dynamique. Cependant, pendant les dernières minutes avant la collision, l'attention du capitaine était davantage centrée sur le maintien visuel de la distance entre le navire et l'appareil de forage, et il n'a pas examiné et réévalué complètement les données de positionnement, les avertissements et les alarmes du système. Pendant ce temps, le second capitaine - navigation continuait à surveiller le chargement sans porter attention au système de positionnement dynamique.
Selon les principes d'une bonne gestion des ressources à la passerelle (GRP), en dépit du fait que chaque membre de l'équipage doit exécuter ses tâches principales, celles-ci ne doivent pas l'empêcher de maintenir une bonne connaissance des activités des autres et de travailler en équipe. Dans le cas présent, toutefois, le capitaine n'a pas informé le second capitaine - navigation des entrées qu'il avait effectuées sur le pupitre du système, et le second capitaine - navigation ne s'en est pas informé. Par conséquent, les données de positionnement du navire dans les affichages du système n'ont pas été surveillées adéquatement.
Ce manque d'efficacité en ce qui concerne la GRP a retardé la reconnaissance des conditions en détérioration et du risque de collision entre le navire et l'appareil de forage, ce qui a empêché l'équipe à la passerelle du Maersk Detector de prendre les mesures d'évitement adéquates. L'équipe ne s'est pas suffisamment servie de l'information affichée sur les pupitres d'exploitation du système de positionnement dynamique et elle n'a pas travaillé en équipe pour assurer le maintien de la séparation entre le navire et l'appareil de forage.
Comme il est démontré ici, et dans d'autres événementsNote de bas de page 43, les lacunes par rapport à la mise en œuvre des principes de GRP sont l'un des facteurs qui contribuent aux accidents maritimes. Cependant, il n'existe aucune exigence réglementaire au Canada obligeant les officiers de pont à recevoir une formation ou à démontrer un maintien des compétences en GRP afin d'obtenir ou de conserver un certificat de compétence ou un brevet. Dans le cas présent, la formation et les compétences en GRP n'étaient pas non plus exigées par l'entreprise, et l'équipe à la passerelle n'y a pas participé de façon volontaire. En l'absence d'une formation structurée et du maintien des compétences sur les principes de GRP, il existe un risque accru que la connaissance qu'a l'équipe à la passerelle de la situation soit déficiente, augmentant ainsi les risques pour le navire, son équipage et l'environnement.
Évaluation des risques pour les opérations de chargement
L'évaluation des risques permet de sensibiliser toutes les personnes concernées aux risques possibles d'une opération et de revoir ou de déterminer les mesures d'atténuation. Elle permet aux membres de l'équipage d'examiner, de discuter et de revoir de façon objective les risques d'une opération particulière et les mesures de contrôle qui pourraient ou devraient être mises en œuvre, ainsi que les moyens d'intervention appropriés en cas d'accident ou d'incident.
Entre 13 h 30 et 14 h, le côté bâbord de l'appareil de forage est passé du côté sous le vent au côté au vent, obligeant le capitaine à procéder à une évaluation des risques, conformément aux lignes directrices de Husky concernant les navires de service en mer. Cependant, aucune évaluation des risques n'a été effectuée par l'équipe à la passerelle ni demandée par l'appareil de forage.
Le capitaine a pris des mesures pour évaluer les conditions environnementales et la capacité du navire :
- Vers 14 h 50, le capitaine a procédé à l'analyse de la capacité du système de positionnement dynamique, et les résultats indiquaient que le navire pouvait maintenir sa position dans n'importe quelle direction dans les conditions météorologiques existantes au moment de l'analyse, mais avec une hauteur significative des vagues (Hs) de 5 m;
- Le capitaine a communiqué avec l'appareil de forage pour obtenir la hauteur significative des vagues;
- Le capitaine a discuté des opérations de chargement avec Husky Logistics et de la possibilité de mettre fin aux opérations.
Les membres de l'équipage n'ont pas pris en considération l'utilisation du côté tribord pour effectuer le chargement, même lorsque le côté tribord est devenu le côté sous le vent. Ils ont poursuivi le chargement du côté bâbord, étant entendu qu'ils cesseraient les opérations en cas de détérioration des conditions. Cette décision indique une tendance à s'en tenir au plan, ce qui est le cas lorsqu'une personne ou une équipe poursuit un plan même si les conditions changent au point où elles auraient été inacceptables si elles avaient été présentes au début des opérations.
On aurait aussi pu décider d'interrompre le chargement, de s'éloigner de l'appareil de forage et de procéder à une évaluation des risques. Ceci aurait permis à l'équipage de mettre en place des mesures de contrôle des risques spécifiques qui auraient pu atténuer le risque accru lié à la poursuite de l'opération.
Communication des conditions météorologiques
Comme les houles en provenance du sud avaient augmenté, vers 15 h, le capitaine a communiqué avec l'opérateur de contrôle des ballasts pour s'informer de la hauteur significative des vagues. On l'a informé que la hauteur significative des vagues était de 3,5 m. L'opérateur de contrôle des ballasts avait 2 sources lui permettant de fournir cette information : les rapports météorologiques (METAR) envoyés par courriel à 14 h 29, qui indiquaient une hauteur des vagues de 3,4 m, et l'écran du système d'avertissement d'amarrage, qui indiquait une hauteur de 3,5 m. Cependant, à 14 h 59, la station météorologique de l'observateur qui se trouve sur la passerelle de l'appareil de forage indiquait une hauteur significative des vagues de 4,14 m. L'écran du système d'avertissement d'amarrage de la salle de contrôle des ballasts avait été mis à jour et indiquait cette même valeur à 15 h 08. Les rapports METAR envoyés par courriel à la salle de contrôle des ballasts à 15 h 26 indiquaient que la hauteur significative des vagues avait augmenté à 4,4 m.
Dans le cas présent, la limite par rapport à la hauteur significative des vagues de 4 m pour les opérations de chargement du côté au vent avait été atteinte au moins 30 minutes avant la collision. Cette information était disponible à la station météorologique et dans d'autres secteurs de l'appareil de forageNote de bas de page 44 au moins 20 minutes avant la collision. Cependant, lorsque la limite a été atteinte, ceci n'a pas été communiqué au navire et à l'opérateur de la grue; au contraire, ils ont dû demander qu'on leur fournisse cette information.
Lorsque les limites environnementales sont définies, elles doivent être activement surveillées et communiquées dès que possible à toutes les personnes impliquées dans les prises de décisions opérationnelles. L'observateur météorologique de l'appareil de forage doit informer de façon proactive les opérateurs d'hélicoptères lorsque les limites des conditions météorologiques pour les opérations des hélicoptères sur l'appareil de forage sont atteintes. Puisqu'il n'y avait pas de procédures semblables pour les opérations de chargement maritimes, le capitaine du navire et l'opérateur de la grue n'étaient pas au courant que la limite par rapport à la hauteur significative des vagues avait été atteinte; c'est pourquoi ils ont poursuivi le chargement de la cargaison.
Procédures relatives à l'état du système de positionnement dynamique
Lors d'opérations de positionnement dynamique où la tolérance est faible, comme dans le cas du maintien de la position d'un navire près d'une installation de forage en mer, l'un des éléments clés de la gestion des risques est la connaissance, chez tous les participants, de l'état du maintien de la position d'un navire. Cet élément est illustré dans les normes de l'industrie qui exigent la surveillance continue de l'état opérationnel du navire pendant les opérations de positionnement dynamique et une façon d'informer tous les membres de l'équipage et tout le personnel concerné en cas de changement d'état.
Malgré que ce soit une exigence dans les lignes directives des navires de service en mer de Husky, il n'y avait aucun système en place sur le Maersk Detector pour catégoriser ou communiquer l'état du navire pendant les opérations de positionnement dynamique. À aucun moment pendant la journée, l'opérateur de la grue ou le personnel de l'appareil de forage n'a été informé que le navire avait reçu un état d'alerte concernant le maintien de la position du navire, même si plusieurs avertissements et alertes apparaissent dans le journal des événements du système de positionnement dynamique du navire. Ils en ont été informés seulement après la collision.
Dans le cas présent, l'opérateur de la grue et l'équipage du navire avaient suffisamment de temps pour coordonner leurs actions, y compris le détachement d'urgence de la grue de levage, ce qui aurait pu éviter la collision. Comme démontré dans le cas présent, en l'absence de procédures bien établies et soigneusement suivies pour communiquer les messages d'urgence ou d'avertissement et prendre les mesures nécessaires, le personnel concerné est plus à risque de ne pas bien connaître la situation d'urgence, d'agir de façon isolée et de prendre des décisions inefficaces.
Données du voyage
Un VDR permet de créer et de maintenir un registre sécurisé et récupérable des renseignements indiquant la position, le mouvement, l'état physique et la maîtrise d'un navire pendant les 12 dernières heures de manœuvre. La disponibilité de données objectives est inestimable pour les enquêteurs lorsqu'ils cherchent à comprendre la séquence des événements et à cerner les problèmes opérationnels et les facteurs humains.
Dans le cas présent, les données audio du VDR étaient corrompues et inutilisables en raison d'une défaillance logicielle. En outre, les données de l'enregistreur chronologique et du journal du panneau du système de positionnement dynamique n'étaient pas disponibles. Ces données auraient servi à l'enquête en permettant de déterminer les commandes qui ont été entrées manuellement par l'opérateur du système de positionnement dynamique et celles qui ont été entrées automatiquement par le système. Lorsque les données électroniques, dans le cas présent les données audio du VDR et les enregistrements de données du système de positionnement dynamique, ne sont pas disponibles aux fins de l'enquête, cela peut nuire à la détermination et à la communication des manquements à la sécurité qui permettraient de promouvoir la sécurité des transports.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Au moment où le capitaine a informé l'opérateur de la grue que le navire était en position et prêt pour le chargement, le navire s'éloignait et s'approchait de l'appareil de forage dans un mouvement d'oscillation, et se trouvait en fait au point le plus éloigné de l'appareil. Par la suite, le navire a commencé à se rapprocher de l'appareil.
- Le capitaine a accordé la priorité à son évaluation visuelle de la distance et de la position au détriment des avertissements et des alarmes émis par le système de positionnement dynamique qui indiquaient que le navire ne maintenait pas bien sa position.
- Même si le navire avait suffisamment de poussée de réserve disponible, la force de poussée vers l'avant appliquée par le système de positionnement dynamique au cours de ces dernières secondes n'a pas suffi à compenser les forces qui poussaient le navire vers l'arrière; le navire a donc heurté l'appareil de forage.
- L'enquête n'a pas permis d'expliquer de façon concluante le mouvement du navire et son incapacité à s'éloigner de l'appareil de forage. Il se peut que ces deux situations aient été le résultat d'une combinaison des éléments suivants : l'interaction entre l'opérateur et le système de positionnement dynamique une brève interruption de la poussée avant juste avant la collision, les effets possibles d'une ou de plusieurs houles importantes et la détérioration des systèmes de repérage à déterminer de façon adéquate la position du navire.
- Les membres de l'équipe à la passerelle n'ont pas travaillé en équipe et ne se sont pas servis adéquatement des données affichées sur les pupitres d'exploitation du système de positionnement dynamique pour maintenir la distance entre le navire et l'appareil de forage. Par conséquent, leur reconnaissance d'une collision imminente a été retardée, ce qui les a empêchés de prendre les mesures d'évitement adéquates.
- Les membres de l'équipage n'ont pas procédé à l'évaluation des risques d'une manœuvre du côté au vent, et ils ont poursuivi le chargement de la cargaison sans prendre de mesures de contrôle des risques spécifiques. De telles mesures auraient pu atténuer le risque accru que présentait l'opération de chargement du côté au vent.
- En l'absence d'une procédure permettant de fournir de façon proactive de l'information pertinente sur les conditions météorologiques aux opérateurs maritimes, le capitaine du navire et l'opérateur de la grue ne savaient pas que la limite de la hauteur significative des vagues avait été atteinte et qu'il fallait cesser les opérations. Par conséquent, on a poursuivi le chargement de la cargaison.
Faits établis quant aux risques
- En l'absence de procédures bien établies et soigneusement suivies pour communiquer les messages d'urgence ou d'avertissement et pour prendre les mesures nécessaires, le personnel concerné est plus à risque de ne pas bien connaître la situation d'urgence, d'agir de façon isolée et de prendre des décisions inefficaces.
- Quand les données du voyage, notamment les enregistrements audio de la passerelle et les enregistrements des données du système de positionnement dynamique, ne sont pas disponibles aux fins de l'enquête, cela peut nuire à la détermination et à la communication des manquements à la sécurité qui permettraient de promouvoir la sécurité des transports.
- En l'absence d'une formation structurée et du maintien des compétences sur les principes de gestion des ressources sur la passerelle, il existe un risque accru que la connaissance qu'a l'équipe à la passerelle de la situation soit déficiente, augmentant ainsi les risques pour le navire, son équipage et l'environnement.
Autres constatations
- Les mesures prises par la bouée flottante qui se trouvait près de l'emplacement de l'événement indiquent qu'il est possible que des vagues d'une hauteur de 8,72 m et de 9,62 m aient frappé le navire au moment de l'événement.
Mesures de sécurité
Mesures de sécurité prises
Le BST a été informé que Maersk Supply Service Canada Ltd. a mis en œuvre les changements suivants :
- Tous les officiers de pont des 2 quarts à bord du Maersk Detector ont reçu une formation sur la gestion des ressources à la passerelle.
- Peu après l'événement, on a procédé au développement et à la mise en œuvre d'une analyse de la sécurité des opérations de positionnement dynamique qui incluaient les lignes directrices concernant les navires de service en mer de Husky.
- Toutes les analyses de la sécurité des opérations de positionnement dynamique et des travaux effectués le long du bord ont été mises à jour pour refléter les faits établis dans le rapport d'enquête.
- Un exemplaire du guide de l'enregistreur chronologique a été placé à bord du Maersk Detector. De la formation sur son fonctionnement et l'entrée des données de positionnement dynamique est offerte aux membres de l'équipage.
- Le logiciel Kelvin Hughes de l'enregistreur des données du voyage (VDR) qui se trouve à bord du Maersk Detector a été mis à jour le 6 décembre 2011 au cours de l'essai annuel de fonctionnement de l'appareil.
- Maersk Supply Service a incorporé dans son évaluation des risques pour les opérations et les procédures de positionnement dynamique des déclencheurs d'arrêt des travaux afin de répondre aux situations d'avertissement et d'urgence sur les navires de service en mer utilisant un système de positionnement dynamique.
Le BST a été informé que Husky Oil Ltd. a procédé aux changements suivants :
- Tous les navires qui sont exploités au nom de Husky ont un accès direct au site Web du fournisseur de services météorologiques afin de se tenir à jour en tout temps sur les prévisions météorologiques (y compris la hauteur des vagues).
- Husky a procédé à la mise en œuvre de directives d'exploitation propres à une activité précise. Ces directives ont été rédigées par un tiers, DP Assurance Company, et incorporent les pratiques exemplaires de l'industrie ainsi que les lignes directrices des opérations en mer.
- Husky a mis en œuvre des exigences en matière d'évaluation des compétences et de formation en positionnement dynamique, qui seront assurées sur les navires par DP Assurance Company. Cette mesure permettra d'offrir une formation continue sur les opérations de positionnement dynamique, les pratiques exemplaires de l'industrie et les lignes directrices concernant les opérations de positionnement dynamique en mer.
- Husky a tenu des séances d'information avec les entrepreneurs des navires de service en mer pour définir clairement les attentes lors des opérations sur le champ pétrolifère de White Rose. Ces sessions présentaient une explication détaillée des limites d'alarme du système de positionnement dynamique et les mesures à prendre lorsque ces alarmes sont déclenchées.
- Husky et son exploitant sous contrat de l'appareil de forage ont élaboré des pratiques de travail touchant une zone de 500 m pour assurer une communication constante, la surveillance de l'environnement de travail et une définition claire du rôle des directeurs d'installations de forage en mer concernant les interactions entre l'appareil de forage et le navire.
- Une présentation a été faite aux autres exploitants du bassin afin de partager leurs expériences et les leçons tirées de l'incident.
Le BST a été informé que l'Office Canada-Terre-Neuve-et-Labrador des hydrocarbures extracôtiers a mis en œuvre les changements suivants :
- L'Office a demandé qu'une mise à jour soit apportée aux documents intitulés Marine Operations Manual, Safety Case et Emergency Response Plan pour le GSF Grand Banks. Cette demande a été prise en charge par Transocean.
- En juillet et septembre 2012, le service de sécurité de l'Office a mené des vérifications sur les opérations maritimes à bord du Henry Goodrich et du GSF Grand Banks; ces vérifications incluaient une révision des opérations des navires d'approvisionnement.
- Des recommandations d'améliorations et d'actions correctives, notamment concernant la formation du personnel, les mises à jour des directives permanentes et des procédures et l'entretien du matériel naval, ont été formulées et mises en œuvre suivant ces évaluations.
Le présent rapport met un terme à l'enquête du Bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le 6 mars 2013. Il est paru officiellement le .
Annexes
Annexe A – Plan général du Maersk Detector

(Cliquez pour agrandir l'image)
Annexe B – Écrans d'affichage du pupitre du système de positionnement dynamique (en anglais seulement)

(Cliquez pour agrandir l'image)

(Cliquez pour agrandir l'image)
Annexe C – Région où s'est produit l'événement

(Cliquez pour agrandir l'image)
sAnnexe D – Positions du Maersk Detector et de l'appareil de forage GSF Grand Banks

(Cliquez pour agrandir l'image)

(Cliquez pour agrandir l'image)

(Cliquez pour agrandir l'image)
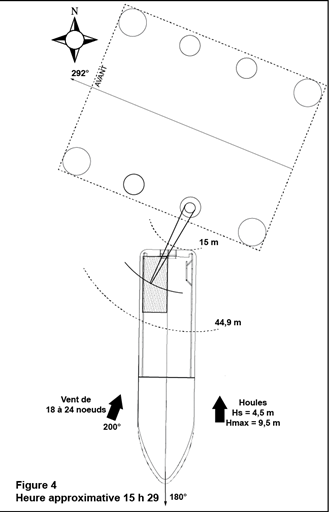
(Cliquez pour agrandir l'image)
Annexe E – Données de l'enregistreur des données du voyage (en anglais seulement)

(Cliquez pour agrandir l'image)
Annexe F – Forces longitudinales et position du navire (en anglais seulement)

(Cliquez pour agrandir l'image)
Annexe G – Tracé de la capacité de positionnement dynamique avec tous les propulseurs en marche (en anglais seulement)

(Cliquez pour agrandir l'image)
Annexe H – Tracés d'empreinte localisatrice (en anglais seulement)

(Cliquez pour agrandir l'image)
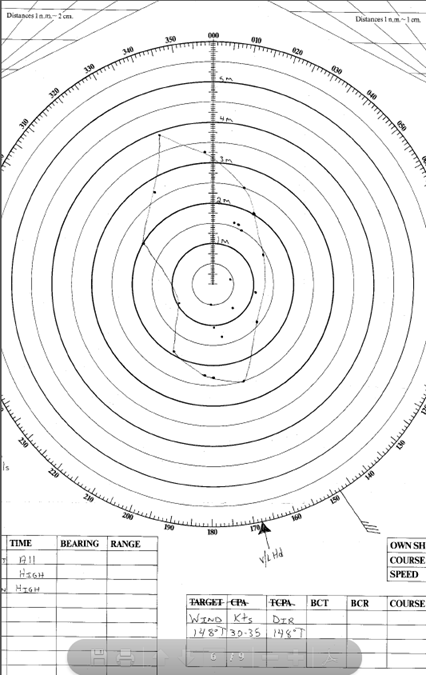
(Cliquez pour agrandir l'image)

(Cliquez pour agrandir l'image)

(Cliquez pour agrandir l'image)