Loss of power and subsequent grounding
Chemical product carrier Bro Anna
Beauharnois, Quebec
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Vessel description
The Bro Anna (Figure 1) is a double-hulled chemical product carrier registered in the Marshall Islands (International Maritime Organization number 9344435). The superstructure and machinery space are located aft and the vessel's propulsion system consists of a main engine that drives a controllable pitch propeller. The vessel is fitted with 3 auxiliary generators, a bow thruster, a shaft generator, and an emergency generator.

The bridge is equipped with 2 very high frequency (VHF) radiotelephones, an electronic chart display and information system (ECDIS), 2 radars, and 3 conning stations: 1 amidships, 1 port, and 1 starboard. The conning stations are fitted with controls for the main engine, the controllable pitch propeller, the bow thruster, and the steering gear (Figure 2).

History of the voyage
On the morning of 29 August 2017, the crew of the Bro Anna finished loading gasoline as cargo and prepared to depart the Port of Montreal, Quebec, for Oakville, Ontario, via the St. Lawrence Seaway.
At 0830,Footnote 1 the third officer on board conducted a pre-departure check of the vessel while it was docked at Section 94 of the Port of Montreal. The pre-departure check included verifying the vessel's navigation equipment and the operation of the main engine, the steering gear, and the bow thruster. After completing the check, the third officer noted in the vessel's logbook that everything was in good working order.
At 0912, the Bro Anna departed the dock and proceeded upbound toward St. Lambert Lock. The bridge team consisted of the master, the pilot, the third officer, and the helmsman.
At about 1115, the master and the pilot conducted a handover exchange and the vessel entered St. Lambert Lock.
At about 1135, the vessel exited the lock and continued upbound toward Beauharnois, Quebec.
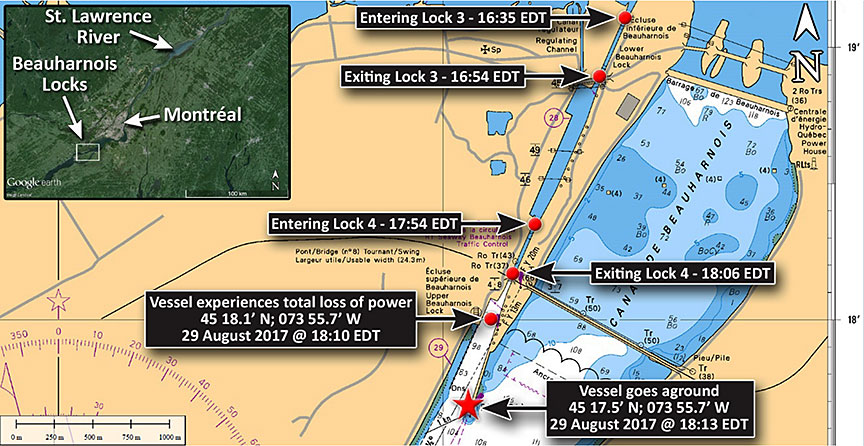
At 1635, the vessel entered the Lower Beauharnois Lock (Lock 3).
At 1654, the vessel exited the lock. Shortly thereafter, the bridge team reported a bow thruster alarm and shutdown. The second engineer went forward to reset the breaker and alarm but was unable to do so.
At 1714, the chief engineer was called. He went forward and reset the breaker and alarm. Once the breaker was reset, the bow thruster came back online and control was restored to the master on the bridge.
At 1754, the vessel entered the Upper Beauharnois Lock (Lock 4). At 1806, it exited the lock, increasing speed to approximately 5 knots.
At 1809, the master shut off the bow thruster and observed a brief fluctuation in the bow thruster's load indicator. The master restarted the bow thruster in order to verify his observation. At the same moment, the crew standing by on the forecastle heard a loud noise, and the crew in the engine room experienced local vibrations.
At 1810, the vessel lost all electrical power, and the main engine, bow thruster, and steering gear shut down. The vessel continued to proceed forward under its own momentum and started swinging to port. Shortly thereafter, the emergency generator automatically activated and electricity was restored to the vessel's essential safety components, which included the steering gear, navigation lights, emergency lights, communication systems, and alarm systems.
At 1811, following the master's orders, the crew standing by on the forecastle let go the starboard anchor with the intention of reducing the vessel's speed and the swing to port.
At 1812, the rudder was put hard to starboard, and the port anchor was let go, but the vessel continued to swing to port.
At 1813, the vessel made contact with the breakwater on the south side of the Beauharnois Canal and subsequently ran aground (Figure 3). The vessel's speed at the time of the grounding was estimated at 4.7 knots.
Power management system
A marine power management system controls the electrical systems on board a vessel, which include auxiliary generators, shaft generators, and various types of circuit breakers and switchboards. To ensure that vessel electrical systems are safe and efficient, the power management system monitors the power consumption of components such as the bow thruster and steering gear. This monitoring system includes alarms and automatic shutdown mechanisms. If power consumption is greater than the generators' capacity for power production, the system starts additional generators or stops non-essential components to avoid a blackout. Circuit breakers can be activated automatically to shut down components when the power management system detects a situation in which the component could be damaged, such as an overload.
The main components of the Bro Anna's power management system include a main engine capable of driving the shaft generator, 3 auxiliary generators, an emergency generator, a main switchboard, auxiliary switchboards, and an emergency switchboard.
The 3 auxiliary generators and the bow thruster were connected to a main bus barFootnote 2 by designated circuit breakers. At the time of the occurrence, the vessel's power management system was set to harbour mode, with all 3 auxiliary generators providing electricity and running in parallel to the main bus bar. The harbour mode setting is intended to be used when the vessel has a low power demand, such as when it is secured alongside.
Electrical system
The Bro Anna's electrical system is designed so that the shaft generator provides electricity solely to the bow thruster when the vessel is manoeuvring. Power to the main switchboard electrical system is then provided by the 3 auxiliary generators and controlled by the power management system. During the occurrence, the shaft generator was not running and the 3 auxiliary generators were providing electricity to the main switchboard and bow thruster switchboard through a tie breaker. As a result, there was no standby generator available in case the electrical load increased beyond the generators' capacity.
The investigation determined that the bow thruster's local circuit breaker trip and time delay settings differed from the manufacturer's specifications and were set to accept a higher load than those of the bow thruster main circuit breaker.
In this occurrence, the bow thruster went into overload and the bow thruster's local circuit breaker was able to accept a higher load due to the incorrect trip and time delay settings. The bow thruster's main circuit breaker received the overload, and the power management system's only option to safely control that overload was to open the main circuit breakers for the 3 auxiliary generators. This caused the blackout and shut down the main engine, the bow thruster, and the steering gear. The 3 auxiliary generators kept running while the emergency generator started and connected to the emergency switchboard. The investigation was unable to determine the source of the overload.
Routine inspections and repairs
The investigation determined that the crew had conducted periodic inspections, maintenance, and repairs on the bow thruster prior to the occurrence. The investigation was unable to determine why the bow thruster's local circuit breaker did not meet the manufacturer's settings, or when the original settings were changed. Under the vessel's inspection regime, the bow thruster's local circuit breaker was not subject to a periodic mandatory inspection.
Additional factual information obtained during the investigation
The programmable logic controller for the power management system that controlled the bow thruster was found to be faulty and indicated that the bow thruster was "Power Management System Ready."
The bow thruster could be started under a loaded condition, which in turn caused a high electrical load demand on the power management system. The short-circuit trip setting on the bow thruster was disabled.
The master, the chief engineer, and the second engineer had limited experience on the Bro Anna but collectively had more than 20 years' experience on this type of vessel.
On 04 August 2017, at 0330, during an approach to the Eisenhower Lock in the St. Lawrence Seaway, the vessel had experienced a bow thruster failure, and auxiliary generator No. 3 went offline. This occurrence was attributed to the bow thruster's thermal overload protection system.
Safety messages
The investigation identified the following unsafe conditions concerning the electrical and power management systems that rendered the Bro Anna vulnerable to a total loss of power:
- The bow thruster's local circuit breaker trip and time delay settings were higher than the manufacturer's recommended settings.
- The main circuit breakers for the 3 auxiliary generators were set to the manufacturer's recommended trip and time delay settings, which were lower than the bow thruster's local circuit breaker settings, making them unable to accept the higher load.
- The power management system was in harbour mode, which did not provide the vessel with optimum electrical efficiency and protection.
Safety action taken
All breakers on the bow thruster and generators on the Bro Anna were set to the manufacturer's recommended trip and time delay settings by a contracted technician.
The ship managers issued a fleet-wide notification to all of their vessels, instructing them to check breaker trip and time delay settings on bow thrusters.
This concludes the TSB's limited-scope investigation into this occurrence. The Board authorized the release of this investigation report on . It was officially released on .